Tabla de contenido
Publicidad
Enlaces rápidos
Pololu Maestro servocontrol
desde USB
Guía de usuario
Pololu Maestro servocontrol ................................................................................................................. 1
Guía de usuario ................................................................................................................................. 1
1. Información general ...................................................................................................................... 2
1.a. Micro Maestro pins y componentes ....................................................................................... 4
1.b. Mini Maestro pins y componentes ........................................................................................ 5
1.c. Indicadores LEDs .................................................................................................................. 7
1.d. Sistemas operativos soportados ............................................................................................. 8
2. Contactando con Pololu ................................................................................................................ 8
3. Primeros pasos .............................................................................................................................. 8
3.a. Instalación de los drivers y software en Windows ................................................................ 8
3.b. Instalación de drivers y software en Linux ............................................................................ 9
3.c. Uso del Maestro sin USB .................................................................................................... 10
4. Uso del Maestro Control Center ................................................................................................. 10
4.a. Estado y control en tiempo real ........................................................................................... 10
4.b. Errores ................................................................................................................................. 11
4.c. Secuencias ............................................................................................................................ 13
4.d. Crear un script ..................................................................................................................... 14
4.e. Ajuste de canales ................................................................................................................. 14
4.f. Actualización del Firmware ................................................................................................. 16
5. Comunicación serie .................................................................................................................... 17
5.a. Ajustes ................................................................................................................................. 17
5.b. TTL Serie ............................................................................................................................. 18
5.c. Protocolos de comandos ...................................................................................................... 19
5.d. Control de redundancia cíclica (CRC) Detección de errores .............................................. 20
5.e. Comandos para servos ......................................................................................................... 21
5.f. Comandos serie para Script .................................................................................................. 23
5.g. Encadenamiento .................................................................................................................. 24
5.h. Ejemplo de código de transmisión ...................................................................................... 25
5.h.1. PIC18F4550 ...................................................................................................................... 25
6. Lenguaje de scripts de Maestro .................................................................................................. 26
6.a. Lenguaje básico para scripts ................................................................................................ 26
6.b. Referencia de comandos ...................................................................................................... 28
6.c. Ejemplo de Scripts ............................................................................................................... 30
6.d. Especificaciones para los scripts ......................................................................................... 37
7. Ejemplos de circuitos ................................................................................................................. 37
7.a. Alimentación de Maestro ..................................................................................................... 37
7.b. Conexión de servos y Periféricos ........................................................................................ 38
7.c. Conectar un microcontrolador ............................................................................................. 40
8. Escribir software para el control de Maestro .............................................................................. 40
9. Maestro limitaciones de ajustes .................................................................................................. 41
Publicidad
Tabla de contenido

Resumen de contenidos para Polulu Micro Maestro 6
-
Página 1: Tabla De Contenido
Pololu Maestro servocontrol desde USB Guía de usuario Pololu Maestro servocontrol ......................... 1 Guía de usuario ..........................1 1. Información general ........................2 1.a. Micro Maestro pins y componentes ..................4 1.b. Mini Maestro pins y componentes ..................5 1.c. Indicadores LEDs ........................7 1.d. -
Página 2: Información General
1. Información general Los controladores Maestro son la segunda generación Pololu de controladores USB servo. La familia maestro consiste en cuatro controladores disponibles de manera ensamblado o en kit parcial: Micro Maestro 6 Mini Maestro 12 Mini Maestro 18 Mini Maestro 24... - Página 3 Características Tres métodos de control: USB, TTL (5 V) serie y con scripts internos. 0.25μs de resolución en la salida de ancho de pulso (corresponde a unos 0.025° para un servo típico, que es más de lo que el servo puede resolver). Configuración de pulso alto y ancho del pulso (ver la tabla comparativa).
-
Página 4: Micro Maestro Pins Y Componentes
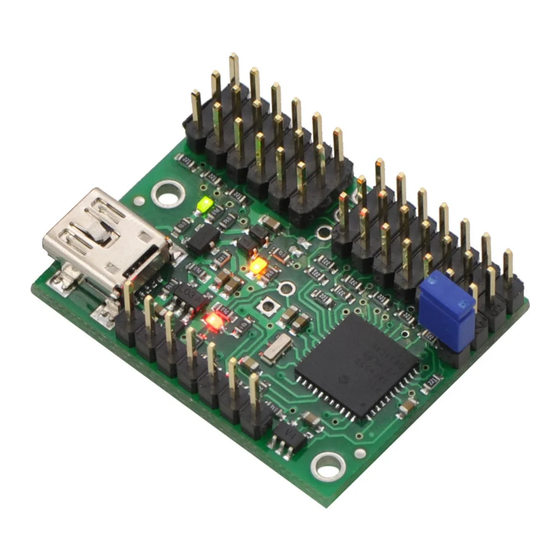
Nota: Esta sección es aplicable para el controlador Micro Maestro. Ver sección 1.b para más información del Mini Maestro. El controlador Pololu Micro Maestro 6-canales puede conectarse a un PC vía puerto USB con un cables USB A a mini-B (no incluido). La conexión USB se usa para configurar el controlador y también para enviar comandos al... -
Página 5: Mini Maestro Pins Y Componentes
La energía para el funcionamiento de los servos se realiza desde la esquina superior derecha de la placa Micro Maestro. La alimentación del servo se recibe directamente sin tener que pasar a través de un regulador por lo que las únicas restricciones para la fuente de alimentación del servo son que debe estar dentro del rango de funcionamiento del mismo y proporcionar suficiente corriente para su aplicación. - Página 6 Nota: Esta sección solo se aplica a los controladores Mini Maestro de 12, 18 y 24. Ver sección 1.a para Micro Maestro. Las Pololu Mini Maestro de 12,18 y 24 canales pueden conectarse al PC vía puerto USB con un cable USB A a mini-B (no incluido).
-
Página 7: Indicadores Leds
El pin RST debe estar bajo para que resetee el micro del Maestro, pero no es necesario para aplicaciones típicas. Internamente la línea está en alto con resistencia pull-up, por lo que puede ser desconectada. La línea ERR es una salida que control del led rojo para cuando hay errores. Se pone en alto cuando el led rojo está... -
Página 8: Sistemas Operativos Soportados
Amarillo parpadeando, rojo fijo: Un error de firmware provoca un reset de software. Esto nunca debería ocurrir durante el uso normal. 1.d. Sistemas operativos soportados Los controladores Maestro y su configuración de software USB trabajan igual bajo Microsoft Windows XP, Windows Vista, Windows 7 y Linux. No es compatible con Mac Os. 2. -
Página 9: Instalación De Drivers Y Software En Linux
6.- Cuando se muestra “Nuevo hardware encontrado” la primera vez selecciona “No, por esta vez” y clic “Siguiente”. 7.- En la segunda pantalla de “Nuevo hardware encontrado” haz “Instala el software automáticamente” y clic “Siguiente”. 8.- Windows XP volverá a mostrar la pantalla de software no testado pero sigue con clic “Continuar la instalación”. -
Página 10: Uso Del Maestro Sin Usb
al PC los dos puertos virtuales aparecen y los dispositivos se renombran como /dev/ttyACM0 (el número dependerá de cuantos dispositivos ACM estén conectados). El puerto /dev/ttyACM1 con número menor es el Command Port, el de mayor numeración será el TTL serie. Puedes usar un Terminal (como kermit) para enviar y recibir bytes por estos puertos. -
Página 11: Errores
introducir un valor objetivo directamente en la casilla El control deslizante "Target (destino)". automáticamente se escala para que coincida con los valores mínimo y máximo que figuran en la pestaña de configuración. Para un canal configurado como entrada, el control deslizante de bolas verdes, "destino" y "posición"... - Página 12 Cuando ocurre un error, el bit correspondiente en el registro de error se pone a 1 y el Maestro envía los servos y las salidas digitales a sus posiciones iniciales, tal como se haya especificado en la ficha configuración (sección 4.e). Cualquier servo o salida configurada con la opción "Ignorar" no cambiará...
-
Página 13: Secuencias
4.c. Secuencias La pestaña permite realizar secuencias de movimiento simple para ser reproducidas por Sequence Maestro. Una secuencia es simplemente una lista de "fotogramas" que especifican las posiciones de los servos y la duración (en milisegundos) para cada uno de ellos. Las secuencias se almacenan en el ordenador desde donde se creó... -
Página 14: Crear Un Script
4.d. Crear un script La pestaña es el lugar donde escribir un script para ser cargado por Maestro. Para más Script información sobre el lenguaje de scripts de Maestro, ver la sección 6. Una vez haya introducido un script, clic en para cargar la "Apply Settings"... - Página 15 1500.00 μs Rate especifica el pulso para cada canal servo. En Micro Maestro 6, todos los servos deben tener guardado el pulso, mientras que en Mini Maestro 12, 18 y 24, pueden tener dos diferentes y escoger el que quieras para cada canal.
-
Página 16: Actualización Del Firmware
Todos los ajustes se ponen con los valores por defecto al realizar la actualización. Descarga la última versión: Firmware versión 1.01 para Micro Maestro 6-Channel (35k pgm) — desde 19-11-2009 Conecta el Maestro a Windows o Linux usando el cable USB. -
Página 17: Comunicación Serie
Selecciona el puerto COM port correspondiente al bootloader. Si no conoces el puerto mira en Administración de dispositivos en el apartado “Puertos (COM & LPT)”. Clic en el botón Verás un mensaje alertando que el firmware del dispositivo va a ser “Program”. -
Página 18: Ttl Serie
UART: En este modo, las líneas TX y RX se usan para enviar comandos al Maestro y recibir respuestas del mismo. Cada byte recibido por RX se envía al Command Port, pero los bytes enviados desde el Command Port son ignorados. El puerto TTL no se usa. La velocidad en baudios se detecta automáticamente por el Maestro cuando se recibe un byte 0xAA por RX, o si lo fijamos a un valor concreto en bits/segs (bps). -
Página 19: Protocolos De Comandos
un bit de parada, cada byte tiene 10 veces más bits para transmitir, luego la velocidad más rápida posible en bytes por segundo es la velocidad dividida por diez. La máxima velocidad de transmisión de Maestro es de 250.000 bits por segundo, luego la máxima transferencia de datos empezara inmediatamente después del bit de parada del byte precedente y será... -
Página 20: Control De Redundancia Cíclica (Crc) Detección De Errores
comandos de forma rápida. El protocolo Mini SSC transmite un (255 en decimal) como 0xFF primer byte de comando seguido del byte de numero de servo y otro de bits con el destino a realizar. El paquete sería el siguiente: 0xFF, byte numservo, byte destinoservo Por ejemplo si estas buscando ajustar el destino del servo 0 a la posición neutral, debes enviar la secuencia siguiente:... -
Página 21: Comandos Para Servos
5.e. Comandos para servos Maestro tiene varios comandos para ajustar el canal, recoger la posición actual y ajustar limites de velocidad y aceleración. (Pololu/Compact protocol) Set Target Compact protocol: 0x84,numcanal,destinoLB,destinoHB Pololu protocol: 0xAA,numdispos,0x04,numcanal,destinoLB,destinoHB Los 7 bits bajos (LB) del 3er byte representan los bits 0–6 del destino (7 bits bajos), los 7 bits bajos del cuarto byte de datos representan los bits 7–13 del destino. - Página 22 ejemplo, usando el protocolo Pololu protocol a 115.2 kbps, enviando el comando a 24 servos tarda --4.6 ms, mientras si los envías de forma individual tardaría 12.5 ms. Set Speed Compact protocol: 0x87,numcanal,velocidadLB,velocidadHB Pololu protocol: 0xAA,numdispos,0x07,numcanal,velocidadLB,velocidadHB Este Comando limita la velocidad del servo al cambiar el valor del canal de salida. El límite de velocidad se da en unidades de 0.25 μs/10 ms excepto en casos especiales (ver sección 4.e).
-
Página 23: Comandos Serie Para Script
Dado que no existe ninguna restricción sobre el bit alto, la posición es formateada como un entero sin signo estándar dos bytes primero el bajo luego el alto. Por ejemplo, a la posición 2567 le daría como respuesta de 0x07, 0x0A. El valor devuelto de la posición es igual a cuatro veces el número mostrado en la caja Position la pestaña... -
Página 24: Encadenamiento
Get Script Status Compact protocol: 0xAE Pololu protocol: 0xAA, numdispositivo, 0x2E Respuesta: 0x00 si el script esta funcionando, 0x01 si está parado El comando responde con un byte para indicar si el script esta en funcionamiento (0) o parado (1) . Mediante este Comando junto con los anteriores, puede activar una secuencia almacenada en Maestro y esperar hasta que se complete antes de pasar a la siguiente línea de programa. -
Página 25: Ejemplo De Código De Transmisión
transmitir simultáneamente varios. Sin embargo, las salidas TX se ponen en alto al no enviar datos, por lo que simplemente no pueden estar conectados juntos. En su lugar, puede utilizar una puerta AND como se muestra en el diagrama para combinar las señales. Observa que en muchos casos el recibir respuestas no es necesario por lo que las líneas TX pueden quedar desconectadas. -
Página 26: Lenguaje De Scripts De Maestro
6. Lenguaje de scripts de Maestro El script es una secuencia de comandos que puede ejecutar Maestro. Los comandos pueden servir para ajustar el destino del servo, la velocidad y la aceleración entrando valores y realizando operaciones matemáticas. Se dispone de estructuras básicas de control – bucles y condicionales – disponibles para crear scripts complejos. - Página 27 Este bucle continuará siempre. Si quieres un bucle que pueda salirse alguna vez debes utilizar WHILE que es lo mejor para ese caso. WHILE consume mayor número en la pila y salta al final del bucle en caso de ser 0. Por ejemplo, supongamos que queremos repetir el bucle 10 veces: 10 # arranca con 10 en la pila begin # copia el numero a la pila - the copy will be consumed by WHILE...
-
Página 28: Referencia De Comandos
6.b. Referencia de comandos Esta tabla es una lista de los comandos y palabras usadas en el lenguaje de scripts de Maestro. La columna “efecto” especifica cuantos números de pila consumen y que se añaden a la pila. Por ejemplo el comando PLUS coge dos números y devuelve uno; luego el “efecto” en la pila será -2+1. Los comandos con efectos especiales se marcan con *. - Página 29 Comandos matemáticos (binarios) Estos comandos cogen dos argumentos de la parte superior de la pila y devuelven uno como resultado. El orden de los argumentos cuando importa son los standard en matemáticas; por ejemplo 1-2 escribirás “1 2 MINUS”. Estos comandos tienen su equivalencia en C (y en otros muchos lenguajes), lee la columna “C equivalent”.
-
Página 30: Ejemplo De Scripts
6.c. Ejemplo de Scripts Parpadeo de LED El siguiente script provoca que el LED rojo de Maestro parpadee cada segundo: # Parpadeo del LED rojo cada segundo. begin led_on 100 delay led_off 900 delay repeat Es buena idea repasar el script antes de seguir. En particular, preste atención a cómo el comando "100"... - Página 31 5000 frame 6000 frame 7000 frame 8000 frame repeat sub frame 0 servo 500 delay return Usando la subrutina recortamos el script 31 bytes: 4 por la posición y 11 bytes por el bucle y la definición de FRAME. Podemos ir más allá: al inspeccionar el código compilado nos muestra que poner cada número en la pila requiere 3 bytes: un byte como comando y dos para el número de dos bytes.
- Página 32 58 54 50 47 44 42 41 40 40 41 43 46 49 52 56 all_frames repeat sub all_frames begin depth while 100 times 0 servo 100 delay repeat return En este código hemos escrito FRAME como subrutina usando el comando DEPTH que automáticamente las lee desde la pila mientras no trabaja.
- Página 33 1 get_position # get the value of the pot, 0-1023 dup 300 less_than 4000 # go to 4000 for values 0-299 else dup 600 less_than 6000 # go to 6000 for values 300-599 else 8000 # go to 8000 for values 600-1023 endif endif 0 servo...
- Página 34 # representa el estado del pulsador hacemos una comparación arbitraria (500). # La subrutina pone el valor logico 1 o a 0 en la pila, según pulsemos. sub button 0 get_position 500 less_than return # Esta subrutina usa la anterior para esperar la pulsación, incluyendo # un pequeño retardo para eliminar rebotes de la entrada.
- Página 35 # is pressed it runs the corresponding sequence. begin button_a if sequence_a endif button_b if sequence_b endif button_c if sequence_c endif repeat # These subroutines each return 1 if the corresponding # button is pressed, y return 0 otherwise. # Currently button_a is assigned to channel 0, # button_b is assigned to channel 1, and # button_c is assigned to channel 2.
- Página 36 sub delay_minutes begin dup while 1 minus 60 delay_seconds # subtract one y delay 1min repeat drop return # remove the 0 from the stack y return Es fácil escribir subrutinas para retardos de horas, días, semanas, o lo que quieras. Tenga en cuenta, sin embargo que el temporizador del Micro Maestro no es tan preciso como un cronómetro - estos retrasos fallar fácilmente en un 1%.
-
Página 37: Especificaciones Para Los Scripts
Salida serie (Mini Maestro 12, 18, y 24 solamente) En Mini-Maestro Mini 12, 18, y 24, un script puede ser usado para enviar datos serie por el puerto TTL serie (línea RX). Esto significa que Maestro puede controlar Maestros adicionales, lo que per- mite un gran número de canales sin necesidad de un microcontrolador aparte. -
Página 38: Conexión De Servos Y Periféricos
La alimentación debe tener una tensión dentro del rango de los servos capaz de suministrar toda la corriente que los servos necesiten. En esta configuración, si el ordenador (u otro host USB) al que el Maestro está conectado se pone en reposo, de forma predeterminada el Maestro también y deja de enviar pulsos a los servos. - Página 39 una resistencia pull-up (1–100k) entre la línea de señal y 5V para que la entrada esté en alto (5V) cuando no se utiliza. Pon el dispositivo entre la línea de señal y GND (0V) para que al activar la entrada se ponga en 0V. El dibujo muestra como hacerlo en un Micro Maestro de seis canales. Nota: Las resistencias externas de pull-up resistor no son necesarias si usas los canales 18, 19 o 20 en Mini Maestro 24 ya que están pueden ser habilitadas internamente en la...
-
Página 40: Conectar Un Microcontrolador
7.c. Conectar un microcontrolador Maestro acepta comando serie TTL de un microcontrolador. Para conectarlo debes primero conectar la línea GND del micro con la correspondiente del Maestro. Cuando conectes la línea TX (transmisión serie) del microcontrolador a la línea RX del Maestro el micro ya podrá enviar comandos. -
Página 41: Maestro Limitaciones De Ajustes
9. Maestro limitaciones de ajustes Limitaciones en las velocidades en baudios En Mini Maestro 12, 18, y 24, las velocidades siguientes no deben excederse o el procesador puede Modo serie 10–100 Hz 111–250 Hz 333 Hz UART/USB encadenado* 200 kbps 115.2 kbps 115.2 kbps Dual-port...