Festo CMMP-AS-M3 Serie Manual Del Usaurio
Ocultar thumbs
Ver también para CMMP-AS-M3 Serie:
- Manual del usuario (320 páginas) ,
- Manual del usaurio (294 páginas) ,
- Manual de usario (290 páginas)
Tabla de contenido
Publicidad
Enlaces rápidos
Publicidad
Capítulos
Tabla de contenido

Manuales relacionados para Festo CMMP-AS-M3 Serie












Resumen de contenidos para Festo CMMP-AS-M3 Serie
- Página 1 CiA 402 para controlador de motor CMMP‐AS‐...‐M3/-M0 Descripión Perfil de equipo CiA 402 para el controlador de motor CMMP-AS-...-M3 a través del bus de campo: – CANopen – EtherCAT con interfaz CAMC-EC para el controlador de motor CMMP-AS-...-M0 a través del bus de campo: –...
- Página 2 Identificadores de texto: • Actividades que se pueden realizar en cualquier orden 1. Actividades que se tienen que realizar en el orden indicado – Enumeraciones generales è Resultado de una actuación/Referencias a informaciones adicionales Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b –...
-
Página 3: Tabla De Contenido
....... . . Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 4 ........Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 5 ........... Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 6 ............... . Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 7: Cmmp-As
Asistencia técnica Para cualquier consulta técnica, diríjase a su representante regional de Festo. Información sobre la versión La presente descripción se refiere a las siguientes versiones: Controlador de Versión... - Página 8 CMMP-AS-...-M3 con las funciones de seguridad STO, SS1, SS2, SOS, SLS, SSR, SSM, SBC. Descripción de la función de Técnica de seguridad funcional para el controlador de motor seguridad STO, CMMP-AS-...-M0 con la función de seguridad integrada STO. GDCP-CMMP-AS-M0-S1-... Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 9 CMMP-AS anteriores. GDCP-CMMP-M3/-M0-RP-... Modificaciones en la instalación eléctrica y descripción de la conversión de proyectos. Ayuda del plugin CMMP-AS Interfaz y funciones del plugin CMMP-AS para Festo para FCT Configuration Tool. è www.festo.com/sp Tab. 2 Documentación del controlador de motor CMMP-AS-...-M3/-M0...
-
Página 10: Interfaces Del Bus De Campo
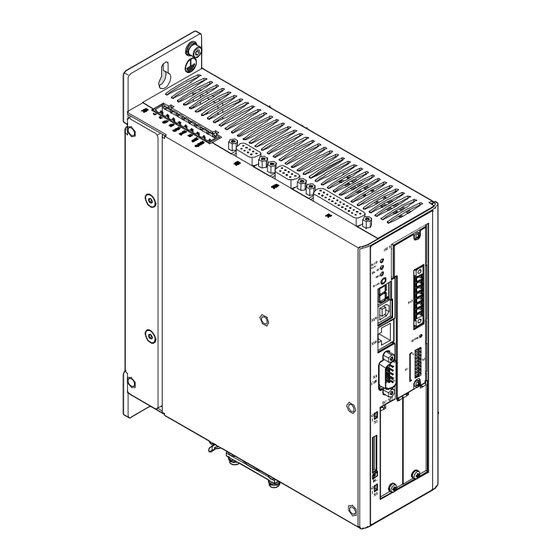
Resistencia de terminación CANopen [S2] Ext3 Interfaz CANopen [X4] CAN-LED Fig. 1.1 Controlador de motor CMMP‐AS‐...‐M3: vista frontal, ejemplo con el módulo de microinterruptores en Ext3 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 11: Canopen [X4]
La implementación CANopen del controlador del motor cumple los estándares siguientes: CiA Draft Standard 301, Versión 4.02, 13 de febrero de 2002 CiA Draft Standard Proposal 402, Versión 2.0, 26 de julio de 2002 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 12: Cableado Y Asignación De Clavijas
El bus CAN ofrece una posibilidad sencilla y sin interferencias para la interconexión de todos los com ponentes de una instalación. Para ello es requisito indispensable observar todas las instrucciones de cableado indicadas a continuación. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 13 Valor Pares de conductores – 0,22 Sección del conductor Blindaje – Sí 0,2 Resistencia del bucle [Ω / m] Impedancia [Ω] 100…120 Tab. 2.2 Especificaciones técnicas del cable del bus CAN Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 14: Configuración Del Participante Canopen En El Cmmp-As
FCT sin conexión con el bus CANopen. Hallará indicaciones respecto a la puesta a punto con el Festo Configuration Tool en la ayuda del plugin FCT específico del equipo. -
Página 15: Ajuste Del Número De Nodo Con Microinterruptores Y Fct
Ajuste de la dirección de base del número de nodo con FCT Con el Festo Configuration Tool (FCT), el número de nodo se ajusta como dirección de base en el regis tro Parámetros de funcionamiento de la página Bus de campo. -
Página 16: Ajuste De La Velocidad De Transmisión Con Microinterruptores
(p. ej. mm, mm/s, mm/s ) con el controlador de motor, estos tienen que parametrizar se a través del grupo de factores è Sección 5.3. La parametrización puede efectuarse a través del FCT. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 17: Configuración Del Participante Canopen En El Cmmp-As
CANopen. Esta sección ofrece un resumen de los pasos necesarios por parte del slave para la parametrización y configuración. Hallará indicaciones respecto a la puesta a punto con el Festo Configuration Tool en la ayuda del plugin FCT específico del dispositivo. -
Página 18: Ajuste Del Número De Nodo Mediante Dins O Fct
La velocidad de transmisión se puede ajustar a través de las entradas digitales DIN12 y DIN13 o en el FCT. Ajuste de la velocidad de transmisión mediante DINs Velocidad de transmisión DIN12 DIN13 [Kbit/s] [Kbit/s] High [Kbit/s] High [Mbit/s] High High Tab. 2.8 Ajuste de la velocidad de transmisión Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 19: Ajuste Del Protocolo (Perfil De Datos) Mediante Dins O Fct
La comunicación CANopen se activa inmediatamente mediante FCT cuando está desactivada la opción “Parametrización de bus de campo mediante DINs”. Mientras el mando del equipo está en FCT, el bus CAN está desconectado. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 20: Ajuste De Las Unidades Físicas (Grupo De Factores)
Configuración de master CANopen Para la configuración del master CANopen puede utilizar un archivo EDS. El archivo EDS está incluido en el CD-ROM suministrado con el controlador de motor. Hallará las versiones más actuales en è www.festo.com/sp Archivos EDS Descripción CMMP-AS-...-M3.eds... -
Página 21: Método De Acceso Canopen
Process Data Object Posibilidad de intercambio rápido de datos de proceso (p. ej., velocidad real). SYNC Synchronisation Message Sincronización de varios nodos CAN. EMCY Emergency Message Transmisión de mensajes de error Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 22: Acceso Sdo
La estructura de las órdenes y de las respuestas depende del tipo de datos del objeto que se desea leer o escribir, ya que se deben enviar o recibir 1, 2 o 4 bytes de datos. Son compatibles los tipos de datos siguientes: Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 23: Secuencias Sdo Para Leer Y Escribir
Datos: 12345678 Orden Respuesta: Atención ¡En cualquier caso debe esperarse a la validación del controlador del motor! Sólo después de que el controlador de motor haya validado la demanda se pueden enviar más demandas. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 24: Mensajes De Error Sdo
3) Este error se retorna, p. ej., si el controlador del motor es controlado por otro sistema de bus o si el acceso a los parámetros no está permitido. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 25: Simulación De Accesos Sdo
No utilizar nunca estas órdenes de prueba en aplicaciones. El acceso sólo debe utilizarse con fines de prueba y no es adecuado para la comunicación en tiempo real. La sintaxis de las órdenes de prueba se puede modificar en cualquier momento. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 26: Pdo-Message
útiles, no información sobre el tipo de parámetro. En el ejemplo siguiente, el valor real de posición se ha transferido a los bytes de datos 0 … 3 del PDO y el valor real de velocidad a los by tes 4 … 7. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 27: Descripción De Los Objetos
La información de mapeado presenta el formato siguiente è Tab. 3.6 transmission_type e Para cada PDO se puede determinar qué evento provoca el envío inhibit_time (Transmit PDO) o la evaluación (Receive PDO) de un mensaje. è Tab. 3.7 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 28 Además, con inhibit_time se puede determinar la distancia mínima entre los envíos de dos PDO en pasos de 100 μs. Tab. 3.7 Tipo de transmisión No está permitido el uso de todos los demás valores. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 29 (100D100 μs). è cob_id_used_by_pdo = 40000187 6. Parametrizar identificador El PDO se debe enviar con el identificador 187 Escribir el identificador nuevo y activar el PDO med iante el borrado del bit 31: Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 30: Objetos Para La Parametrización De Pdo
Value Range 0 … 8C , FE , FF Default Value Sub-Index Description inhibit_time_tpdo1 Data Type UINT16 Access Mapping PDO Units 100 μs (p. ej., 10 = 1 ms) Value Range – Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 31 Data Type UINT32 Access PDO Mapping Units – Value Range – è Tabla Default Value Sub-Index Description third_mapped_object_tpdo1 Data Type UINT32 Access PDO Mapping Units – Value Range – è Tabla Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 32 (100 μs) UINT16 0000 1A01 number of mapped objects UINT8 1A01 first mapped object UINT32 60410010 1A01 second mapped object UINT32 60610008 1A01 third mapped object UINT32 00000000 1A01 fourth mapped object UINT32 00000000 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 33 2014 number of entries UINT8 2014 tpdo_1_transmit_mask_low UINT32 FFFFFFFF 2014 tpdo_1_transmit_mask_high UINT32 FFFFFFFF tpdo_2_transmit_mask Index Comment Type Acc. Default Value 2015 number of entries UINT8 2015 tpdo_2_transmit_mask_low UINT32 FFFFFFFF 2015 tpdo_2_transmit_mask_high UINT32 FFFFFFFF Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 34 UINT8 1601 number of mapped objects UINT8 1601 first mapped object UINT32 60400010 1601 second mapped object UINT32 60600008 1601 third mapped object UINT32 00000000 1601 fourth mapped object UINT32 00000000 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 35: Activación De Los Pdo
– El estado de comunicación del controlador del motor debe ser operational (è capítulo 3.6, Gestión de la red: servicio NMT) Para poder parametrizar los PDO deben cumplirse los siguientes requisitos: – El estado de comunicación del controlador de motor no puede ser operational. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 36: Sync-Message
Cuando aparece un error, el número de éste se muestra en el indicador del controlador del motor. Si aparecen simultáneamente varios mensajes de error, el indicador muestra siempre el mensaje que tiene la prioridad más alta (el número más bajo). Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 37 El EMERGENCY Message consta de ocho bytes de datos, los dos primeros de los cuales contienen un error_code cuyo significado se muestra en la tabla siguiente. El tercer byte contiene otro código de error (objeto 1001 ). Los otros cinco bytes contienen ceros. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 38 Para poder volver a activar la unidad de salida del controlador del motor después de un error, se debe ejecutar adicionalmente un acuse de recibo del error è capítulo 6.1: Diagrama de estado (State Machine). Index 1003 Name pre_defined_error_field Object Code ARRAY No. of Elements Data Type UINT32 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 39: Gestión De La Red (Servicio Nmt)
De este se puede, p. ej., activar un reset en todos los dispositivos al mismo tiempo. Los reguladores no validan las órdenes NMT. La ejecución correcta de la orden sólo puede comprobarse indirectamente (p. ej., mediante la señal de conexión después de un reset). Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 40 A través del byte CS en el mensaje NMT pueden originarse modificaciones de estado. Éstas están orien tadas esencialmente hacia el estado objetivo. Power On Reset Application Reset Communication Pre-Operational (7F Stopped (04 Operational (05 Fig. 3.2 Diagrama de fases Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 41 Comunicación posible a través de SDO. Los PDO no están – activos (no se envían/evalúan) Operational Comunicación posible a través de SDO. Todos los PDO es tán activos (enviar/evaluar) Stopped No hay comunicación excepto Heartbeating – – Tab. 3.11 NMT-State Machine Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 42 La estructura del mensaje Bootup es casi idéntica a la del siguiente mensaje Heartbeat. La única diferencia es que en lugar del estado NMT se envía un cero. Identificador: 700 + número de nodo Identificador mensaje Bootup Longitud de datos Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 43: Heartbeat (Error Control Protocol)
Para activar la funcionalidad Heartbeat se puede determinar el tiempo entre dos telegramas Heartbeat mediante el objeto producer_heartbeat_time. 1017 Index Name producer_heartbeat_time Object Code Data Type UINT16 Access Units Value Range 0 … 65535 Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 44: Nodeguarding (Error Control Protocol)
La respuesta del regulador está estructurada de forma análoga al mensaje Heartbeat. Sólo contiene 1 byte de datos útiles, el Togglebit y el estado NMT del regulador (è capítulo 3.6). Identificador: 700 + número de nodo Togglebit / estado NMT Longitud de datos Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 45 ). Por lo tanto se recomienda escribir 1 en el life_time_factor y es pecificar el tiempo en milisegundos directamente a través de guard_time. Index 100C Name guard_time Object Code Data Type UINT16 Access Mapping PDO Units Value Range 0 … 65535 Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 46 TPDO2 Pueden modificarse si es necesario. TPDO3 TPDO4 RPDO1 RPDO2 RPDO3 RPDO4 SYNC EMCY + número de nodo HEARTBEAT + número de nodo NODEGUARDING + número de nodo BOOTUP + número de nodo Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 47: Ethercat Con Coe
EtherCAT y se puede efectuar entre el CMMP-AS-...-M3 a partir de la revisión 01 y el software de parametrización FCT a partir de la versión 2.0. En el CMMP-AS-...-M3 Festo ofrece compatibilidad con el protocolo CoE (CANopen over EtherCAT). - Página 48 Elementos de conexión e indicación de la interfaz EtherCAT La interfaz EtherCAT sólo puede funcionar en la ranura opcional Ext2. El uso de otros módulos de interfaz en la ranura opcional Ext1 no resulta posible, a excepción del CAMC-D-8E8A. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 49: Montaje De La Interfaz Ethercat En El Controlador
Asignación de los conectores enchufables [X1] y [X2] Valor Función Interfaz EtherCAT, nivel de señal 0 … 2,5 V DC Interfaz EtherCAT, tensión diferencial 1,9 … 2,1 V DC Tab. 4.4 Especificación de la interfaz EtherCAT Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 50 CMMP-AS-...-M3 se desconecte a causa de un fallo, por motivos de seguridad. Terminación de bus No se requieren terminaciones externas de bus. El módulo de tecnología EtherCAT supervisa sus dos puertos y termina el bus automáticamente (función loopback). Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 51: Configuración Del Participante Ethercat
Importante: La parametrización y la puesta a punto del controlador de motor son solo posibles en una interfaz de control EtherCAT con un master conectado. Hallará notas respecto a la puesta a punto con el Festo Configuration Tool en la ayuda del plugin FCT específico del equipo. -
Página 52: Interfaz De Comunicación Canopen
En el protocolo CoE, estos dos tipos se utilizan para diferentes tipos de transferencia CANopen como se indica a continuación: Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 53 Todos los objetos se envían a través de los denominados canales de sincronización. Los datos de estos canales se integran y transmiten automáticamente al flujo de datos EtherCAT. La implementación Ether Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 54 CANopen que se han añadido al sistema de bus de campo EtherCAT en el rango de 1000 a 1FFF . Éstos reemplazan principalmente los parámetros de comunicación confor me a CiA 301. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 55 PDO de recepción (RxPDO) y cuatro PDO de transmisión (TxPDO). Los objetos 1008 , 1009 y 100A no son compatibles con CMMP-AS-...-M3 porque las cadenas de lenguaje usual no pueden leerse en el controlador de motor. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 56 Access Mapping PDO Value Range Default Value Sub-Index Description Communication Type Sync Channel 0 Access Mapping PDO Value Range 2: Mailbox Transmit (Master => Slave) Default Value 2: Mailbox Transmit (Master => Slave) Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 57 Por lo tanto, el objeto tiene siempre los valores siguientes: Index 1C10 Name Sync Manager Channel 0 (Mailbox Receive) Object Code Array Data Type uint8 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 58 A continuación, en los subíndices 1 a 4 se registra el número de objeto del PDO que debe asignarse al canal. Sólo se pueden utilizar los números de objeto de los Receive PDO previamente configurados (objetos 1600 … 1603 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 59 Default Value 1601 : second Receive PDO Sub-Index Description PDO Mapping object Number of assigned RxPDO Access Mapping PDO Value Range 1602 : third Receive PDO Default Value 1602 : third Receive PDO Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 60 0: no PDO assigned to this channel Sub-Index Description PDO Mapping object Number of assigned TxPDO Access Mapping PDO Value Range 1A00 : first Transmit PDO Default Value 1A00 : first Transmit PDO Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 61 Default Value 1A02 : third Transmit PDO Sub-Index Description PDO Mapping object Number of assigned TxPDO Access Mapping PDO Value Range 1A03 : fourth Transmit PDO Default Value 1A03 : fourth Transmit PDO Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 62 Indica la unidad utilizada para visualizar los valores de aceleración en el controlador. El objeto sólo sirve como contenedor de datos. El firmware no realiza una evaluación adic ional. Tab. 4.8 Objetos de comunicación no compatibles Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 63: Máquina De Estado De Comunicación
Tab. 4.9 Estados de la máquina de estado de comunicación Entre cada uno de los estados de la máquina de estado de comunicación sólo pueden darse transic iones conforme a lo indicado en Fig. 4.3: Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 64 Stop Output Update, Stop Input Update: parada de la comunicación cíclica (protocolo de telegramas de datos de proceso). El slave deja de enviar valores reales al master y el master deja de enviar valores nominales al slave. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 65 En la tabla siguiente se contrastan los diferentes estados: EtherCAT State CANopen NMT State Power ON Power-On (inicialización) Init Stopped Safe-Operational – Operational Operacional Tab. 4.11 Comparación de los estados en EtherCAT y CANopen Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 66: Trama Sdo
– SDO upload expedited response. – SDO upload segmented request (máx. 1 segmento con datos útiles de 4 bytes). – SDO upload segmented response (máx. 1 segmento con datos útiles de 4 bytes). Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 67: Trama Pdo
Puesto que en el controlador de motor CMMP-AS-...-M3 todos los datos intercambiados a través del protocolo CoE EtherCAT se envían directamente a la implementación CANopen interna, el PDO también Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 68 – Telegrama síncrono de trama PDO mediante el protocolo de telegramas de datos de proceso. El controlador de motor CMMP-AS-...-M3 con interfaz EtherCAT es compatible con cuatro PDO de recep ción (RxPDO) y cuatro PDO de transmisión (TxPDO). Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 69: Control De Errores
Otros datos opcionales. Puesto que en la implementación CoE para el controla dor de motor CMMP-AS-...-M3 solo son compatibles las tramas de emergencia CANopen estándar, el campo “Data (optional)” no se utiliza. Tab. 4.14 Emergency Frame: elementos Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 70: Archivo De Descripción De Equipos Xml
Por esta razón, la configuración del slave puede modificarse con este archivo. Festo ha confeccionado un archivo de descripción de equipos de estas características para el controla dor de motor CMMP-AS-...-M3. Se puede descargar de la página web de Festo. Seguidamente explica... - Página 71 En la tabla siguiente se describen exclusivamente los subnodos del nodo “Descriptions” necesarios para parametrizar el controlador de motor CMMP-AS-...-M3 con CoE. El resto de los nodos son fijos y el usuario no debe modificarlos. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 72: Configuración De Pdo De Recepción En El Nodo Rxpdo
Sync Manager. Ejemplo de una entrada típica del archivo de descripción de equipos para el contro lador de motor CMMP-AS-...-M3: <RxPDO Fixed=”1” Sm=”2”> <Index>#x1600</Index> <Name>Outputs</Name> <Entry> <Index>#x6040</Index> <SubIndex>0</SubIndex> <BitLen>16</BitLen> <Name>Controlword</Name> <DataType>UINT</DataType> </Entry> <Entry> <Index>#x6060</Index> <SubIndex>0</SubIndex> <BitLen>8</BitLen> <Name>Mode_Of_Operation</Name> <DataType>USINT</DataType> </Entry> </RxPDO> Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 73 Data Type Esta entrada indica el tipo de datos del objeto que debe mapearse. Sí Se puede consultar para cada objeto CANopen en la descripción correspondiente. Tab. 4.19 Elementos del nodo “Entry” Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 74 Tab. 4.20 Elementos del nodo “InitCmd” Importante: En un archivo de descripción de equipos para el controlador de motor CMMP-AS-...-M3 ya existen algunas entradas en esta sección. Es obligatorio mantener estas entradas y el usuario no debe modificarlas. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 75: Sincronización (Distributed Clocks)
– La Ethernet debe estar reservada en exclusiva para la trama EtherCAT. Si es necesario, otros teleg ramas deben sincronizarse con el barrido y no deben bloquear el bus. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 76: Ajustar Parámetros
CANopen 1010 (save_all_parameters). Al conectar el controlador de motor se copia automáticamente el conjunto de parámetros de la aplicación en el conjunto de parámetros actual. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 77 Antes de conectar por primera vez el paso de salida, asegurarse de que el controlador contiene realmente los parámetros deseados. Un controlador parametrizado incorrectamente puede girar incontroladamente y causar daños personales o materiales. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 78 ángulo (que en parte requieren un reset para ser efectivos) permanecen inalterados. Objeto 1010 : store_parameters 1010 Index Name store_parameters Object Code ARRAY No. of Elements Data Type UINT32 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 79 Si el objeto se escribe a través de un SDO, el comportamiento por defecto es que el SDO es respondido inmediatamente. De esta manera la respuesta no refleja el final del proceso de memorización. No obstante, el comportamiento se puede modificar a través del objeto 6510 (compatibility_control). Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 80: Ajustes De Compatibilidad
Index Objeto Nombre Tipo Attr. 6510_F0 compatibility_control UINT16 Objeto 6510 : compatibility_control Sub-Index Description compatibility_control Data Type UINT16 Access Mapping PDO Units – , è tabla Value Range 0 … 1FF Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 81 (voltage_enabled) se emite en conformidad con CiA 402 v2.0. Además el estado FAULT_REACTION_ACTIVE se puede distinguir del estado FAULT. è al respecto el capítulo 6 0100 reserved El bit está reservado. No se debe activar. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 82: Factores De Conversión (Factor Group)
Unidades de posición Incrementos 65536 incrementos por revolución Velocidad Unidades de velocidad Revoluciones por minuto Aceleración Unidades de aceleración (min Aumento de la velocidad por segundo Tab. 5.3 Valor predeterminado del “Factor Group” Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 83 (p. ej., “mm”) Motor Caja de cambios Fig. 5.3 Cálculo de las unidades de posición Index 6093 Name position_factor Object Code ARRAY No. of Elements Data Type UINT32 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 84 La constante de avance se visualiza en las unidades de posición deseadas (columna 2). Finalmente se pueden introducir todos los valores en la fórmula y calcular la fracción: Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 85 3) Revoluciones en la entrada de potencia por cada revolución en la salida de potencia (R entre R 4) Introducir valores en la fórmula. Tab. 5.5 Ejemplos de cálculo del factor de posición Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 86 (R feed_constant Relación entre las revoluciones en la salida de potencia (ROUT) y el movimiento en position_units (p. ej., 1 revolución = 360 grados) Tab. 5.6 Parámetro de factor de velocidad Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 87 4096 min 1 PD å 60 1 1966080 è 1/10 4096 min num: 131072 div: 631, 5 6315 60 * 4096 631, 5 4096 min 10 s Fig. 5.5 Cálculo del factor de velocidad Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 88 El objeto acceleration_factor sirve para la conversión de todos los valores de aceleración de la ap licación de acceleration_units a la unidad interna revoluciones por minuto por 256 segundos. Está formado por numeradores y denominadores. Index 6097 Name acceleration_factor Object Code ARRAY No. of Elements Data Type UINT32 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 89 El cálculo del acceleration_factor se lleva a cabo con la fórmula siguiente: gear_ratio * time_factor_a nummerator acceleration_factor divisor feed_constant El acceleration_factor también se escribe en el controlador de motor separado por numeradores y denominadores, por lo tanto puede ser necesario ampliarlo. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 90 ). Constante de avance del actuador * 10 (número de posic iones decimales) 3) Factor de tiempo_v: unidad de tiempo deseada por cada unidad de tiempo interna 4) Factor de reducción: R entre R 5) Introducir valores en la fórmula. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 91 , 80 , C0 Default Value Valor Nombre Significado velocity_polarity_flag 0: multiply by 1 (por defecto) 1: multiply by -1 (inverso) position_polarity_flag 0: multiply by 1 (por defecto) 1: multiply by -1 (inverso) Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 92: Parámetros De Paso De Salida
CAN. Para ello, el objeto 6510 (enable_logic) se debe poner a dos. Por motivos de seguridad esto tiene lugar automáticamente al activar CANopen (también después de un reset del controlador de motor). Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 93 Description pwm_frequency Data Type UINT16 Access Mapping PDO Units – Value Range 0, 1 Default Value Valor Significado Frecuencia normal de paso de salida Frecuencia del paso de salida reducida a la mitad Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 94 6510 (max_power_stage_temperature) la etapa de salida se desconecta y se transmite un mensaje de error. Sub-Index Description power_stage_temperature Data Type INT16 Access Mapping PDO Units °C Value Range – Default Value – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 95 Objeto 6510 : actual_dc_link_circuit_voltage Mediante el objetoactual_dc_link_circuit_voltagese puede leer la tensión actual del circuito intermedio en milivoltios. Sub-Index Description actual_dc_link_circuit_voltage Data Type UINT32 Access Mapping PDO Units Value Range – Default Value – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 96 Por debajo de esta tensión se dispara el error E 02-0 si éste había sido activado con el objeto siguiente. Sub-Index Description min_dc_link_circuit_voltage Data Type UINT32 Access Mapping PDO Units Value Range 0 … 1000000 Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 97 A causa de una reducción de la potencia es posible que se visualicen otros valores depen diendo del tiempo de ciclo del regulador y de la frecuencia secuencial del paso de salida. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 98 Los valores son válidos para un tiempo de ciclo del regulador de corriente de 125 μs. A causa de una reducción de la potencia es posible que se visualicen otros valores depen diendo del tiempo de ciclo del regulador y de la frecuencia secuencial del paso de salida. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 99: Regulador De Corriente Y Adaptación De Motor
Si la secuencia de fases del cable del motor o del transductor angular es incorrecta, puede originarse una realimentación que impida regular la velocidad en el motor. ¡El motor puede girar de manera descontrolada! Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 100 . Muchos motores pueden sobrecargarse temporalmente con el factor 4. En ese caso debe inscribirse el valor 4000 en este objeto. El objeto 6073 (max_current) sólo puede escribirse si anteriormente se ha escrito de forma válida el objeto 6075 (motor_rated_current). Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 101 6075 (motor_rated_current) para proteger el motor. El ajuste estándar es de dos segundos y es aplicable a la mayoría de los motores. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 102 Con el objeto iit_error_enable se determina el comportamiento del controlador de motor cuando aparezca la limitación I t. Esto sólo se visualiza en la statusword o bien se activa el error E 31-0. Index 6510 Name drive_data Object Code RECORD No. of Elements Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 103 (resolver etc.). La orientación del transmisor de ángulo respecto al campo magnético permanente se debe introducir en el objeto encoder_offset_angle. Con el software de parametrización se puede determinar el ángulo. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 104 Sub-Index motor_temperatur_sensor_polarity Description Data Type INT16 Access Mapping PDO Units – Value Range 0, 1 Default Value Valor Significado Contacto normalmente cerrado Contacto normalmente abierto Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 105 Para poder introducir dicha constante de tiempo en el objeto torque_control_time primero debe convertirse a microsegundos. Con una indicación de tiempo de 0,6 milisegundos debe introducirse correspondientemente el valor 600 en el objeto torque_control_time. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 106 Mapping PDO Units 256 = “1” Value Range 0 … 32*256 Default Value 3*256 (768) Sub-Index Description torque_control_time Data Type UINT16 Access Mapping PDO Units μs Value Range 104 … 64401 Default Value 1020 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 107: Regulador De Velocidad
Para poder introducir dicha constante de tiempo en el objeto velocity_control_time primero debe convertirse a microsegundos. Con un tiempo de 2,0 milisegundos debe introducirse cor respondientemente el valor 2000 en el objeto velocity_control_time. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 108 Data Type UINT16 Access Mapping PDO Units μs Value Range 1 … 32000 Default Value 2000 Sub-Index velocity_control_filter_time Description Data Type UINT16 Access Mapping PDO Units μs Value Range 1 … 32000 Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 109: Controlador De Posición (Position Control Function)
(following_error_window), en el objeto statusword se activa el bit 13 following_error. El período de tiempo se puede predeterminar mediante el objeto following_error_time_out. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 110 Esta función ofrece la posibilidad de definir una ventana de posición alrededor de la posición de destino (target_position). Si la posición real del accionamiento se encuentra en esta zona durante un tiempo determinado (el position_window_time), entonces el bit 10 relacionado (target_reached) se activa en el statusword. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 111 UINT32 6066 following_error_time_out UINT16 6067 position_window UINT32 6068 position_window_time UINT16 607B ARRAY position_range_limit INT32 60F4 following_error_actual_value INT32 60FA control_effort INT32 60FB RECORD position_control_parameter_set 6510 position_range_limit_enable UINT16 6510 position_error_switch_off_limit UINT32 1) En incrementos Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 112 Esto se puede evitar limitando convenientemente la salida del controlador de posición mediante el objeto position_control_v_max (p. ej., 500 rpm). Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 113 Value Range 0 … 131072 rpm Default Value 500 rpm Sub-Index position_error_tolerance_window Description Data Type UINT32 Access Mapping PDO Units position units Value Range 1 … 65536 (1 rev) Default Value 2 (1/32768 rev) Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 114 (è cap. 5.11). Este objeto se indica en unidades definidas por el usuario. Index 202D Name position_demand_sync_value Object Code Data Type INT32 Access Mapping PDO Units position units Value Range – Default Value – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 115 – la velocidad de posicionamiento es demasiado elevada – los valores de aceleración son demasiado altos – el objeto following_error_window está ocupado con un valor demasiado bajo – el regulador de posición no está parametrizado correctamente Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 116 Con este objeto se puede leer el error de seguimiento actual. Este objeto se indica en unidades definidas por el usuario. 60F4 Index Name following_error_actual_value Object Code Data Type INT32 Access Mapping PDO Units position units Value Range – Default Value – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 117 (target_position) ha sido alcanzada. Index 6067 Name position_window Object Code Data Type UINT32 Access Mapping PDO Units position units Value Range – Default Value 1820 (1820/65536 rev = 10°) Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 118 0 … 2 Default Value Valor Significado Valor límite del error de seguimiento OFF (reacción: NINGUNA ACCIÓN) 0 Valor límite del error de seguimiento ON (reacción: DESCONECTAR DE INMEDIATO EL PASO DE SALIDA) Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 119 Para ello el accionamiento adapta él mismo el signo de la velocidad de desplazamiento. En los dos modos “Sentido de giro fijo” el posicionamiento se re aliza sólo en el sentido indicado en el modo. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 120 También se memorizan todos los parámetros correspondientes a la memoria del transmisor con sus valores actuales. 2030 Index Name set_position_absolute Object Code Data Type INT32 Access Mapping PDO Units position units Value Range – Default Value – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 121: Limitación De Valor Nominal
Sub-Index Description limit_current_input_channel Data Type UINT8 Access Mapping PDO Units – Value Range 0 … 4 Default Value Sub-Index Description limit_current Data Type INT32 Access Mapping PDO Units Value Range – Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 122 Data Type UINT8 Access Mapping PDO Units – Value Range 0 … 4 Default Value Sub-Index Description limit_speed Data Type INT32 Access Mapping PDO Units speed units Value Range – Default Value – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 123 Ajustar parámetros Valor Significado Sin limitación AIN0 AIN1 AIN2 Bus de campo (Selector B) Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 124: Adaptaciones Del Transmisor
16 bits, aquí se devuelve siempre el valor 65536. Con los objetos encoder_x2a_numerator y encoder_x2a_divisor se puede considerar un reductor eventual (también con signo) entre el árbol del motor y el transductor. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 125 El objeto encoder_x2b_counter muestra el número de incrementos contado actualmente. Por lo tanto suministra valores entre 0 y el número ajustado de incrementos-1. Los objetos encoder_x2b_numerator y encoder_x2b_divisor permiten considerar un reductor entre el árbol del motor y el transmisor conectado a [X2B]. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 126 – Value Range 1 … 32767 Default Value Sub-Index Description encoder_x2b_counter Data Type UINT32 Access Mapping PDO Units Incrementos (4 * número de impulsos) Value Range 0 … (encoder_x2b_resolution -1) Default Value – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 127 Incrementos (4 * número de impulsos) Value Range Depende del transmisor utilizado Default Value Depende del transmisor utilizado Sub-Index Description encoder_x10_numerator Data Type INT16 Access Mapping PDO Units – Value Range –32768 … 32767 (excepto 0) Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 128: Emulación De Encoder Incremental
1:1. Con el objeto encoder_emulation_offset se puede desplazar la posición del impulso de puesta a cero emitido frente a la posición cero del transmisor de valor real. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 129 El objeto encoder_emulation_resolution sólo está disponible por motivos de compatibilidad. Corres ponde al objeto 201A Index 2028 encoder_emulation_resolution Name Object Code Data Type INT32 Access Mapping PDO è 201A Units è 201A Value Range è 201A Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 130: Conexión Adicional Del Valor Nominal/Real
Si se elige el otro transmisor, se conmuta automáticamente al transmisor de conmutación. Index 2021 Name position_encoder_selection Object Code Data Type INT16 Access Mapping PDO Units – Value Range 0 … 2 (è tabla) Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 131 0, de modo que la posición sincrónica siempre está conectada. Mediante el bit 8 se puede determinar si el recorrido de referencia se debe realizar sin conexión de la posición sincrónica para poder referenciar el master y el slave por separado. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 132 2023 Index Name synchronisation_filter_time Object Code Data Type UINT32 Access Mapping PDO Units μs Value Range 10 … 50000 Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 133: Entradas Analógicas
ARRAY No. of Elements Data Type INT16 Sub-Index Description analog_input_voltage_ch_0 Access Mapping PDO Units Value Range – Default Value – Sub-Index analog_input_voltage_ch_1 Description Access Mapping PDO Units Value Range – Default Value – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 134 No. of Elements Data Type INT32 Sub-Index Description analog_input_offset_ch_0 Access Mapping PDO Units Value Range –10000 … 10000 Default Value Sub-Index Description analog_input_offset_ch_1 Access Mapping PDO Units Value Range –10000 … 10000 Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 135: Entradas Y Salidas Digitales
: digital_inputs Mediante el objeto 60FDh pueden leerse las entradas digitales: Index 60Fd Name digital_inputs Object Code Data Type UINT32 Access Mapping PDO Units – Value Range Según la tabla siguiente Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 136 UINT32 Sub-Index Description digital_outputs_data Access Mapping PDO Units – Value Range – Default Value (Depende del estado del freno) Sub-Index Description digital_outputs_mask Access Mapping PDO Units – Value Range – Default Value 00000000 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 137 OFF (0) o en ON (12). Index 2420 digital_outputs_state_mapping Name Object Code RECORD No. of Elements Sub-Index Description dig_out_state_mapp_dout_1 Data Type UINT8 Access Mapping PDO Units – 0 … 44, è tabla Value Range Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 138 Estado colectivo: preparado para habilitar el regulador Trigger de posición 1 Trigger de posición 2 Trigger de posición 3 Trigger de posición 4 22 … 25 Reservado Se ha alcanzado el objetivo alternativo Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 139 Función para CAMC-D-8E8A 0 DOUT1 8 … 15 0000FF00 EA88_0_dout_1_mapping Función para CAMC-D-8E8A 0 DOUT2 16 … 23 00FF0000 EA88_0_dout_2_mapping Función para CAMC-D-8E8A 0 DOUT3 24 … 31 FF000000 EA88_0_dout_3_mapping Función para CAMC-D-8E8A 0 DOUT4 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 140 Función para CAMC-D-8E8A 0 DOUT5 8 … 15 0000FF00 EA88_0_dout_5_mapping Función para CAMC-D-8E8A 0 DOUT6 16 … 23 00FF0000 EA88_0_dout_6_mapping Función para CAMC-D-8E8A 0 DOUT7 24 … 31 FF000000 EA88_0_dout_7_mapping Función para CAMC-D-8E8A 0 DOUT8 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 141: Detector De Final De Carrera/Interruptor De Referencia
Name drive_data Object Code RECORD No. of Elements Sub-Index Description limit_switch_polarity Data Type INT16 Access Mapping PDO Units – Value Range 0, 1 Default Value Valor Significado Contacto normalmente cerrado Contacto normalmente abierto Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 142 Sub-Index Description homing_switch_polarity Data Type INT16 Access Mapping PDO Units – Value Range 0, 1 Default Value Valor Significado Contacto normalmente cerrado Contacto normalmente abierto Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 143 (rampa de paro de emergencia de limitador de carrera). Sub-Index Description limit_switch_deceleration Data Type INT32 Access Mapping PDO Units acceleration units Value Range 0 … 3000000 rpm/s Default Value 2000000 rpm/s Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 144: Muestreo De Posiciones
(muestreo continuo) o si el muestreo se debe bloquear después de un evento de muestreo hasta que se vuelva a habilitar. Observe que incluso un rebote puede activar ambos flancos. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 145 Sub-Index Description sample_status_mask Data Type UINT8 Access Mapping PDO Units – 0 … 1, è tabla Value Range Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 146 Data Type INT32 Access Mapping PDO Units position units Value Range – Default Value – Sub-Index Description sample_position_falling_edge Data Type INT32 Access Mapping PDO Units position units Value Range – Default Value – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 147: Control De Frenado
Nombre Tipo Attr. 6510 RECORD drive_data Objeto 6510 : brake_delay_time Mediante el objeto brake_delay_time se puede parametrizar el tiempo de retardo de frenado. 6510 Index Name drive_data Object Code RECORD No. of Elements Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 148: Información Sobre El Dispositivo
(revision_number) y el número de serie del equipo (serial_number). 1018 Index Name identity_object Object Code RECORD No. of Elements Sub-Index Description vendor_id Data Type UINT32 Access Mapping PDO Units – Value Range 0000001D Default Value 0000001D Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 149 Mapping PDO Units MMMMSSSS (M: main version, S: sub version) Value Range – Default Value – Sub-Index serial_number Description Data Type UINT32 Access Mapping PDO Units – Value Range – Default Value – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 150 Mediante el objeto firmware_main_version puede leerse el número de la versión principal del firmware (etapa del producto). Sub-Index Description firmware_main_version Data Type UINT32 Access Mapping PDO Units MMMMSSSS (M: main version, S: sub version) Value Range – Default Value – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 151 Mediante el objeto firmware_type se puede leer para qué serie de dispositivos y para qué tipo de transductor angular es adecuado el firmware cargado. Sub-Index Description firmware_type Data Type UINT32 Access Mapping PDO Units – Value Range 00000F2 Default Value 00000F2 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 152 Mediante el objeto cycletime_position_controller puede leerse el tiempo de ciclo del regulador de posición en microsegundos. Sub-Index Description cycletime_position_controller Data Type UINT32 Access Mapping PDO Units μs Value Range – Default Value 000001F4 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 153 En tal caso tenga en cuenta que el software de parametrización también accede a este objeto. Sub-Index Description commisioning_state Data Type UINT32 Access Mapping PDO Units – Value Range – Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 154 “A” en el visualizador digital de siete segmentos Tenga en cuenta que en el objeto commissioning_state se debe activar como mínimo un bit para eliminar la “A” del visualizador digital de siete segmentos. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 155: Gestión De Errores
El número de error principal se indica por lo general antes del guión (p. ej., error 08-2, número de error principal 8). Para los posibles números de error è al respecto también el cap. 3.5. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 156 Significado Ninguna acción Entrada en memoria intermedia Advertencia en el visualizador digital de siete segmentos y en la palabra de estado Habilitación de regulador desconectada Frenar con corriente máxima Paso de salida desconectado Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 157 Mapping PDO Units – Value Range – Default Value – Valor Significado 0 … 3 000F Número secundario de la advertencia 4 … 11 0FF0 Número principal de la advertencia 8000 Advertencia activa Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 158: Mando Del Equipo (Device Control)
Los estados y las transiciones de estado constituyen el diagrama de (State Machine) estado, es decir, el cuadro general de todos los estados y las transiciones posibles. Tab. 6.1 Términos del control del controlador Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 159 Los estados más importantes del controlador de motor están marcados en color más oscuro en el diag rama. Después de la conexión, el controlador de motor se inicializa y alcanza finalmente el estado Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 160 El motor puede girar libremente. Error eliminado + comando Bit 7 = Fault Reset = Confirmación de error 0 è 1 Fault Reset Tab. 6.2 Transiciones de estado más importantes del controlador de motor Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 161 . Para la transición de es tado 2 es irrelevante si el bit 3 está activado. 1) El host debe esperar hasta que el estado se pueda leer en statusword. Esto se describe detalladamente más abajo. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 162 El motor tiene tensión y se regula conforme a la Fault Reaction Function. FAULT Se ha producido un error. El motor no tiene tensión. 1) El paso de salida está conectado. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 163 Se bloquea el paso de salida. Transición interna finalizado El motor puede girar libremente. Error eliminado + Bit 7 = Validar error (con flanco ascen Fault Reset 0 è 1 comando Fault Reset dente). Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 164 5, 6 y 8 depende del modo actual de funcionamiento (modes_of_operation) del controlador de motor, que se describe después de este capítulo. Index 6040 Name controlword Object Code Data Type UINT16 Access Mapping PDO Units – Value Range – Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 165 Hasta que el estado requerido se pueda leer también en statusword no podrá es cribirse otro comando mediante controlword. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 166 En la transición de cero a uno el controlador de motor intenta validar los errores existentes. No obstante, la validación sólo es posible si se ha eliminado la causa del error. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 167 Así como a través de la combinación de varios bits del controlword se pueden iniciar diferentes transiciones de estado, mediante la combinación de distintos bits del statusword puede leerse en qué estado se encuentra el controlador de motor. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 168 En el ejemplo se presupone que no hay ningún otro bit activado en controlword (para las transiciones únicamente resultan importantes los bits 0 … 3). 1) Para identificar los estados también se deben evaluar los bits no activados (véase la tabla). De ahí que statusword se deba enmascarar adecuadamente. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 169 Representan el estado actual del dispositivo. Además del estado del controlador del motor, en statusword se visualizan diversos eventos; cada bit tiene asignado un evento determinado, p. ej., error de seguimiento. Significado de cada uno de los bits: Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 170 Este bit indica que el paso de salida del controlador de motor puede habilitarse a través de la red CAN. Está activado cuando la lógica de habilitación del regulador está ajustada de forma correspondiente a través del objeto enable_logic. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 171 Este bit indica que la interpolación está activada y que se evalúan los registros de datos de inter polación. Se activa cuando se ha solicitado mediante el bit enable_ip_mode en controlword. è también el capítulo 7.4 en cualquier caso. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 172 Para poder reflejar otros estados del regulador que no deben existir en el statusword (que con frecuen cia se consulta cíclicamente), se ha introducido el grupo de objetos manufacturer_statusword que se amplia para el módulo de seguridad. Index 2000 Name manufacturer_statuswords Object Code RECORD No. of Elements Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 173 Reservado y usado para el disco de leva. Bit 8 SAFE_STANDSTILL “Pausa segura” en el indicador de 7 segmentos. Uso a través del módulo de seguridad CAMC-G-S1. Bit 9 ... 11 – Reservado para ampliaciones. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 174 únicamente se evalúan si su bit correspondiente de manufacturer_status_mask_1 está activado. Si después del enmascaramiento aún está activado como mínimo un bit, también se activará el bit 14 del statusword. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 175 Manufacturer_ status_mask_1 … … 2005 … … o bien Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit 10 11 12 13 14 15 statusword 6041 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 176 è al respecto también el capítulo 6.1.5. Index 2005 Name manufacturer_status_masks Object Code RECORD No. of Elements Sub-Index Description manufacturer_status_mask_1 Data Type UINT32 Access Mapping PDO Units – Value Range – Default Value 0x00000000 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 177 Name FSM_vout Object Code RECORD No. of Elements Sub-Index Description FSM_vout_0_31 Data Type UINT32 Access PDO Mapping Units – Value Range – Default Value – Bits 0..31 = VOUT0..31 del módulo de seguridad Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 178 Estado lógico DIN46, selector del modo de servicio (1 de 3) Bit 7 LOUT55 Estado lógico DIN47, selector del modo de servicio (1 de 3) Bit 8 LOUT56 Acuse de recibo del error sobre DIN48 Bit 9 LOUT57 Rearranque sobre DIN49 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 179 8 (de OPERATION ENABLE a READY TO SWITCH ON). El objeto indica el comportam iento implementado del controlador de motor. No se puede modificar. Index 605B Name shutdown_option_code Object Code Data Type INT16 Access Mapping PDO Units – Value Range Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 180 Quick Stop. El objeto indica el comportamiento implementado del controlador de motor. No se puede modificar. Index 605A Name quick_stop_option_code Object Code Data Type INT16 Access Mapping PDO Units – Value Range Default Value Valor Significado Frenar con quickstop_deceleration Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 181 0. Para modificar la reacción de error de cada uno de los errores è capítulo 5.18, Gestión de errores. Index 605E fault_reaction_option_code Name Object Code Data Type INT16 Access Mapping PDO Units – Value Range Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 182: Ajuste Del Modo De Funcionamiento
Con el objeto modes_of_operation se ajusta el modo de funcionamiento del controlador de motor. Index 6060 modes_of_operation Name Object Code Data Type INT8 Access Mapping PDO Units – Value Range 1, 3, 4, 6, 7 Default Value – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 183 “User” para indicar que los selectores han sido modificados. Index 6061 Name modes_of_operation_display Object Code Data Type INT8 Access Mapping PDO Units – Value Range ver tabla Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 184: Modo De Funcionamiento Recorrido De Referencia (Homing Mode)
El recorrido de referencia El usuario puede determinar la velocidad, la aceleración y el tipo de recorrido de referencia. Con el objeto home_offset se puede desplazar la posición cero del accionamiento a cualquier punto. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 185 (palabras de estado) Objeto 607C : home_offset El objeto home_offset fija el desplazamiento de la posición cero frente a la posición de referencia determinada. Home Zero Position Position home_offset Fig. 7.2 Home Offset Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 186 Index 6098 Name homing_method Object Code Data Type INT8 Access Mapping PDO Units Value Range -18, -17, -2, -1, 1, 2, 7, 11, 17, 18, 23, 27, 32, 33, 34, 35 Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 187 Este objeto determina las velocidades que se utilizan durante el recorrido de referencia. Index 6099 homing_speeds Name Object Code ARRAY No. of Elements Data Type UINT32 Sub-Index Description speed_during_search_for_switch Access Mapping PDO Units speed units Value Range – Default Value 100 min Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 188 Si se sobrepasa dicho tiempo sin que haya finalizado el recorrido de referencia, se emitirá el error 11-3. Index 2045 homing_timeout Name Object Code Data Type UINT16 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 189 2) Los detectores de final de carrera son ignorados durante el recorrido hasta el tope. 3) Como el eje no debe detenerse sobre el tope, el recorrido debe parametrizarse sobre el punto cero del eje y el desplazamiento del punto cero del eje debe ser ≠ 0. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 190 2) Los detectores de final de carrera son ignorados durante el recorrido hasta el tope. 3) Como el eje no debe detenerse sobre el tope, el recorrido debe parametrizarse sobre el punto cero del eje y el desplazamiento del punto cero del eje debe ser ≠ 0. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 191 2) Los detectores de final de carrera son ignorados durante el recorrido hasta el tope. 3) Como el eje no debe detenerse sobre el tope, el recorrido debe parametrizarse sobre el punto cero del eje y el desplazamiento del punto cero del eje debe ser ≠ 0. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 192 2) Los detectores de final de carrera son ignorados durante el recorrido hasta el tope. 3) Como el eje no debe detenerse sobre el tope, el recorrido debe parametrizarse sobre el punto cero del eje y el desplazamiento del punto cero del eje debe ser ≠ 0. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 193 3) Como el eje no debe detenerse sobre el tope, el recorrido debe parametrizarse sobre el punto cero del eje y el desplazamiento del punto cero del eje debe ser ≠ 0. Tab. 7.1 Resumen de los métodos de recorrido de referencia Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 194: Modo De Funcionamiento Posicionamiento (Profile Position Mode)
(position_demand_value) para el regulador de posición, que se describe en el capítulo Regulador de posición (Position Control Function, capítulo 6). Estos dos bloques de funciones pueden ajustarse independientemente uno de otro. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 195 INT16 Objetos relacionados de otros capítulos Index Objeto Nombre Tipo Capítulo 6040 controlword INT16 6 Mando del equipo 6041 statusword UINT16 6 Mando del equipo 605A quick_stop_option_code INT16 6 Mando del equipo Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 196 El objeto end_velocity (velocidad final) define la velocidad que debe tener el accionamiento cuando alcanza la posición de destino (target_position). Normalmente este objeto debe ponerse en cero para que el controlador de motor se detenga al alcanzar la posición de destino (target_position). Para posic Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 197 El objeto profile_deceleration indica la deceleración de frenado. Se indica en las unidades de aceleración (acceleration units) definidas por el usuario (è capítulo 5.3 Factores de conversión (Factor Group)). 6084 Index Name profile_deceleration Object Code Data Type UINT32 Access Mapping PDO Units acceleration units Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 198 Quick Stop (è capítulo 6). El objeto quick_stop_deceleration se indica en la misma unidad que el objeto profile_deceleration. Index 6085 Name quick_stop_deceleration Object Code Data Type UINT32 Access Mapping PDO Units acceleration units Value Range – Default Value 14100 min Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 199 Estos dos métodos se controlan mediante los bits new_set_point y change_set_immediatly en el objeto controlword y set_point_acknowledge en el objeto statusword. La relación entre estos bits es de pregunta-respuesta. Así es posible preparar una orden de posicionamiento mientras aún se está ejecutando otra. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 200 Antes de ello el host no puede iniciar ningún posicionamiento nuevo 7. En la Fig. 7.5 se inicia un nuevo posicionamiento sólo después de que el posicionamiento anterior haya finalizado por completo. Para ello el host evalúa el bit target_reached en el objeto statusword. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 201 Si en el controlword, además del bit new_set_point, también se pone en “1” el bit change_set_immed iately, el host indica al controlador de motor que el nuevo posicionamiento debe empezar inmed iatamente. Si se encuentra en proceso una orden de posicionamiento, ésta será interrumpida. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 202: Especificación Sincrónica De La Posición (Interpolated Position Mode)
Después se describen detalladamente la activación y la secuencia de parametrización. 7.4.2 Descripción de los objetos Objetos tratados en este capítulo Index Objeto Nombre Tipo Attr. 60C0 interpolation_submode_select INT16 60C1 interpolation_data_record 60C2 interpolation_time_period 60C3 ARRAY interpolation_sync_definition UINT8 60C4 interpolation_data_configuration Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 203 2 (ip_data_controlword) y después el subíndice 1 (ip_data_position) ya que internamente la aceptación de datos se inicia con acceso de escritura a ip_data_position. Index 60C1 Name interpolation_data_record Object Code RECORD No. of Elements Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 204 CAN, se debe guardar el registro de datos (è capítulo 5.1) y ejecutar un reset (è capítulo 6) para que el nuevo intervalo de sincronización sea efectivo. El intervalo de sincronización debe respetarse con exactitud. Index 60C2 Name interpolation_time_period Object Code RECORD No. of Elements Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 205 (ip_sync_every_n_event) de telegramas de sincronización por cada intervalo de sincronización. Para la serie CMMP sólo se puede ajustar el telegrama SYNC estándar y 1 SYNC por cada intervalo. Index 60C3 interpolation_sync_definition Name Object Code ARRAY No. of Elements Data Type UINT8 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 206 Index 60C4 Name interpolation_data_configuration Object Code RECORD No. of Elements Sub-Index Description max_buffer_size Data Type UINT32 Access Mapping PDO Units – Value Range Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 207 Valor Significado FIFO Sub-Index Description buffer_position Data Type UINT16 Access Mapping PDO Units – Value Range Default Value Sub-Index Description size_of_data_record Data Type UINT8 Access Mapping PDO Units – Value Range Default Value Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 208 (-1). Si una vez finalizada la sincronización los telegramas SYNC no se envían en la retícula de tiempo correcta, el con trolador del motor regresa al modo de funcionamiento no válido. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 209 En particular la asignación y la secuencia resultantes son las siguientes: SYNC modes_of_operation = 7 modes_of_operation_display = 7 controlword bit 4: enable_ip_mode controlword bit 12: ip_mode_active Position 1 … 5 : Definiciones de posiciones Fig. 7.8 Sincronización y habilitación de datos Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 210: Modo De Funcionamiento Regulación De La Velocidad (Profile Velocity Mode)
– Limitación del valor nominal del par (torque_demand_value) – Supervisión de la velocidad nominal (velocity_actual_value) con la función de ventana / umbral El significado de los parámetros siguientes está descrito en el capítulo Posicionamiento (Profile Position Mode): profile_acceleration, profile_deceleration, quick_stop. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 211 (6041 velocity = 0 velocity_actual_value (606C Window Comparator velocity_treshold (606F velocity_window_time (606E status_word (6041 velocity_reached velocity_actual_value (606C Window Comparator velocity_window (606D Fig. 7.9 Estructura del funcionamiento con regulación de velocidad (Profile Velocity Mode) Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 212 La serie de productos CMMP no permite la conexión de un transmisor de velocidad separado. Por eso para determinar el valor real de velocidad debería utilizarse en general el objeto 606C Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 213 Dicho valor se ve afectado por el valor nominal del generador de rampas o del generador de curvas de desplazamiento. Cuando el regulador de posición está activado se suma además su velocidad de cor rección. Index 606B Name velocity_demand_value Object Code Data Type INT32 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 214 : velocity_actual_value Con el objeto velocity_actual_value puede leerse el valor real de velocidad. Index 606C velocity_actual_value Name Object Code Data Type INT32 Access Mapping PDO Units speed units Value Range – Default Value – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 215 Units speed units Value Range – Default Value – velocity_control_filter_time (60F9 Filter internal velocity value velocity_actual_value (606C [speed units] Filter velocity_actual_value_filtered [speed units] (2074 velocity_display_filter_time (2073 Fig. 7.10 Determinación de velocity_actual_value y velocity_actual_value_filtered Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 216 12 (velocity = 0) se borra en el statusword. El período de tiempo se deter mina mediante el objeto velocity_threshold_time. Index 606F velocity_threshold Name Object Code Data Type UINT16 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 217 El valor nominal de la velocidad se limita a este valor. 6080 Index Name max_motor_speed Object Code Data Type UINT16 Access Mapping PDO Units Value Range 0 … 32768 min Default Value 32768 min Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 218: Rampas De Velocidad
La siguiente figura muestra un ejemplo de este comportamiento: Entrada del generador de rampas Salida del generador de rampas velocity_deceleration_pos (2090 velocity_acceleration_neg (2090 velocity_deceleration_neg (2090 velocity_acceleration_pos (2090 Fig. 7.11 Rampas de velocidad Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 219 Mapping PDO Units acceleration units Value Range – Default Value 14 100 min Sub-Index Description velocity_deceleration_pos Data Type INT32 Access Mapping PDO Units acceleration units Value Range – Default Value 14 100 min Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 220 Mapping PDO Units acceleration units Value Range – Default Value 14 100 min Sub-Index Description velocity_deceleration_neg Data Type INT32 Access Mapping PDO Units acceleration units Value Range – Default Value 14 100 min Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 221: Modo De Funcionamiento Regulación Del Par (Profile Torque Mode)
(6077 current_actual_value (6078 Torque max_current (6073 Limit DC_link_voltage Control Function (6079 motor_rated_current (6075 Power Stage control effort Motor max_current (6073 motor_rated_current (6075 motor_rated_current (6075 Fig. 7.12 Estructura del funcionamiento con regulación del par Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 222 RECORD motor_parameters 5.5 Regulador de corriente y adaptación de motor 6075 motor_rated_ UINT32 5.5 Regulador de corriente y adaptación de motor current 6073 max_current UINT16 5.5 Regulador de corriente y adaptación de motor Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 223 6075 : motor_rated_current se ha escrito previamente con un valor válido. Index 6072 Name max_torque Object Code Data Type UINT16 Access Mapping PDO Units motor_rated_torque/1000 Value Range -1000 … 65536 Default Value 2023 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 224 – Default Value Objeto 6077 : torque_actual_value A través de este objeto puede leerse el par real en milésimas del momento nominal (objeto 6076 Index 6077 Name torque_actual_value Object Code Data Type INT16 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 225 Con este objeto se puede leer la tensión del circuito intermedio del regulador. La tensión se indica en milivoltios. Index 6079 dc_link_circuit_voltage Name Object Code Data Type UINT32 Access Mapping PDO Units Value Range – Default Value – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 226 Actualmente en este regulador sólo está implementada la rampa lineal, de modo que en este objeto sólo se puede introducir el valor 0. Index 6088 Name torque_profile_type Object Code Data Type INT16 Access Mapping PDO Units – Value Range Default Value Valor Significado Rampa lineal Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 227: Apéndice Técnico
–25 … +75 iento Grado higrométrico, a una 0 … 90 temperatura ambiente de 40 °C máx., sin condensación 1000 Altitud admisible (sobre el nivel del mar) Tab. A.4 Especificaciones técnicas: almacenamiento Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 228: Mensajes De Diagnóstico
Hallará una lista completa de los mensajes de diagnosis conforme a las versiones de firmware existen tes en el momento de publicación del presente documento en la sección B.3. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 229: Errorcodes A Través De Cia
Error 1 medición de corriente V PS off 5282h 21-2 Error 2 medición de corriente U PS off 5283h 21-3 Error 2 medición de corriente V PS off 5410h Subtensión en I/O dig. 05-3 PS off Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 230 No se puede descodificar el conjunto de parámetros del en 09-1 Configurable coder 73A3h Versión desconocida de conjunto de parámetros de transduc 09-2 Configurable tor angular 73A4h 09-3 Estructura de datos defectuosa de conjunto de parámetros de Configurable encoder Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 231 Configurable 8A86h Recorrido de referencia: final del recorrido de búsqueda 11-6 Configurable 8A87h 33-0 Error de seguimiento de la emulación de encoder Configurable F080h Desbordamiento de regulador de corriente, IRQ 80-0 PS off Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 232 Desbordamiento de Low-Level, IRQ PS off F085h Desbordamiento de MDC de IRQ 81-5 PS off FF01h 28-0 Falta el contador de horas de servicio Configurable FF02h 28-1 Contador de horas de servicio: error de escritura Configurable Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 233: Mensajes De Diagnosis Con Notas Sobre La Eliminación De Fallos
Entrada de registro del módulo de seguridad Ignore Información: è Entrada en memoria de diagnosis. Causa Medida – 0-22 Juego de parámetros por defecto descargado Ignore Información: è Entrada en memoria de diagnosis. Causa Medida – Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 234 • Comprobar la parametrización (regulador de corriente, valores límite de corriente). • Comprobar la parametrización del sensor o su curva característica. Si se dan errores incluso cuando el sensor está puenteado: Aparato averiado. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 235 – ¿Equipo sobrecargado? Medida • Comprobar las condiciones de montaje. ¿Están sucios los filtros de los ventiladores del armario de maniobra? • Comprobar la configuración del actuador (por si hay sobrecarga en el funcionamiento permanente). Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 236 • Desconectar el equipo de todos los periféricos y comprobar si después de reiniciarlo sigue habiendo un error. Si es así, hay una avería interna è Reparación por el fabricante. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 237 • Avería interna è Reparación por el fabricante. Medida Error de alimentación del transmisor PSoff Causa Medición inversa de la tensión del transmisor incorrecta. • Avería interna è Reparación por el fabricante. Medida Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 238 • Comprobar si hay cortocircuito o un valor de resistencia demasiado bajo en la resistencia de frenado externa. • Comprobar el circuito de la salida del chopper de frenado en el controlador de motor (puente, etc.). Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 239 Si el error vuelve a aparecer esporádicamente, examinar la conexión de apantallamiento o comprobar si el resolver presenta una relación de transmisión demasiado baja (resolver normalizado: A = 0,5). Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 240 P. ej. en EnDat 2.2 o EnDat 2.1 sin pista analógica. adicional Transmisor Heidenhain: Referencias EnDat 22 y EnDat 21. En estos transmisores no hay señales incrementales, incluso cuando los cables están conectados. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 241 – ¿Cable del transductor angular averiado? – ¿Transductor angular averiado? Medida Comprobar la configuración de la interfaz del transductor angular. a) ¿Perturbación de señales del transmisor? b) Probar con otro transmisor. è Tab. B.2, página 294. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 242 – ¿Intensidad lumínica remisiva en transmisores ópticos? – ¿Número de revoluciones excedido? – ¿Transductor angular averiado? Medida Si el error se produce persistentemente, el transmisor está averiado. è Cambiar el transmisor. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 243 Debido a los prolongados tiempos de respuesta, este sistema no puede utilizarse para la evaluación puramente serial. El transmisor debe utilizarse con evaluación analógica de señales de pista è Conectar la evaluación analógica de señales de pista Z0. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 244 • Vuelva a guardar los parámetros del transmisor para borrar el conjunto de parámetros del transmisor y cambiarlo por un conjunto que pueda leerse. Si el error sigue apareciendo, puede que el transmisor esté averiado. • Cambiar el transmisor a modo de prueba. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 245 No han podido guardarse todos los datos en la EEPROM del transductor angular. Medida • Reduzca el número de los conjuntos de datos que deben guardarse. Lea la documentación o póngase en contacto con el soporte técnico. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 246 Recorrido de referencia: Tiempo sobrepasado Configurable Causa Se alcanzó el tiempo máximo parametrizado para el recorrido de referencia, antes incluso de que finalizara el recorrido de referencia. Medida • Comprobar la parametrización del tiempo. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 247 Ha concluido el trayecto máximo permitido del recorrido de referencia sin que se haya alcanzado el punto de referencia ni el destino del recorrido de referencia. Medida Fallo en la detección del interruptor. • ¿Interruptor del recorrido de referencia averiado? Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 248 • Cambiar el equipo a modo de prueba. Si otro equipo con el mismo cableado funciona sin faltas, enviar el equipo al fabricante para su verificación. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 249 PSoff Tensión de circuito intermedio insuficiente Causa Los parámetros del regulador de corriente no pueden determinarse (no hay alimentación suficiente). Medida La tensión disponible del circuito intermedio es insuficiente para realizar la medición. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 250 Medida • Cerciorarse de que haya tensión suficiente del circuito intermedio. • ¿El cable del transmisor está conectado al motor correcto? • ¿Motor bloqueado, p. ej. el freno de sostenimiento no se suelta? Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 251 Error en la ejecución del programa. La CPU ha empleado un vector IRQ no utilizado. Medida • Si se repite el error, volver a cargar el firmware. Si el error se produce repetidamente, el hardware está averiado. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 252 La temperatura del motor (analógica) es superior a 5° en T_máx. Medida • Comprobar la parametrización del regulador de corriente o del regulador del número de revoluciones. • ¿El motor está siempre sobrecargado? Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 253 El margen de valores se ha excedido al convertirse con Factor Group. Error matemático en la conversión de las unidades físicas. Medida Margen de valores de datos y de unidades físicas no acordes entre sí. • Comprobar y corregir. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 254 Revisón de hardware inválida PSoff Causa El firmware cargado no es compatible con la revisión de hard ware del controlador. Medida • Comprobar la versión de firmware, si es necesario, actualícelo a una versión más reciente. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 255 Si el error se repite, puede que el hardware esté averiado. 26-5 5585 h Faltan datos de calibración PSoff Causa Los parámetros de calibración de fábrica están incompletos/corruptos. Medida El error no lo puede subsanar por sí solo. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 256 La causa es desconocida, puede que haya problemas con el hardware. Medida Esto solo es una advertencia y no es necesario adoptar más medidas. Si aparece de nuevo, puede que el hardware esté averiado. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 257 – Sistema de archivos no compatible. – Error en relación con la Shared Memory. Medida • Comprobar el tipo de tarjeta utilizado. • Conectar la tarjeta de memoria a un PC y formatearla de nuevo. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 258 – Otro error al descargar el firmware, p. ej. error en suma de prueba en un SRecord, error de flash, etc. Medida • Conectar la tarjeta de memoria al PC y copiar el archivo de firmware. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 259 Resistencia de frenado I²t 2314 h Configurable Causa – Sobrecarga de la resistencia de frenado interna. Medida • Utilizar resistencia externa. • Reducir valor de resistencia o utilizar resistencia con carga de impulso mayor. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 260 (relé de red). Medida • En la aplicación, comprobar que la alimentación de la red y el desbloqueo del regulador se efectúen consecutivamente con un breve intervalo entre sí. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 261 (modo de posición interpolada) ha fallado. – ¿Error de mensajes de sincronización del master? – ¿Intervalo de sincronización (intervalo IPO) parametrizado demasiado grande/pequeño? Medida • Comprobar los ajustes de los tiempos de ciclo del regulador. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 262 En este caso, reduzca la corriente de excitación. En el caso contrario, si el actuador no se mueve, la corriente de excitación puede que no sea suficientemente fuerte y la saturación no se marca demasiado. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 263 Encadenamiento de conjuntos N.º Código Mensaje Reacción 41-0 Encadenamiento de frases: Error de sincronización Configurable Causa Inicio de una sincronización sin pulso de muestreo anterior. Medida • Comprobar la parametrización del tramo de parada previa. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 264 Interruptor de final de carrera: Valor nominal negativo Configurable bloqueado Causa Se ha alcanzado el interruptor de final de carrera por hardware negativo. Medida • Comprobar la parametrización, el cableado y los interruptores de final de carrera. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 265 “regulación del par” o conceder la habilitación del regulador en uno de estos modos de funcionamiento aunque el actuador necesite para ello una posición de referencia válida. Medida • Realice un recorrido de referencia. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 266 Se ha producido un error de SDO Configurable Causa Un SDO-Transfer ha ocasionado un SDO-Abort. – Los datos exceden el margen de valores. – Acceso a un objeto que no existe. Medida • Comprobar la orden enviada. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 267 Solo CMMP-AS-...-M0: Fallo de tensión interno de la conmutación STO. Medida • Circuito de seguridad averiado. No hay medidas posibles, póngase en contacto con Festo. Si es posible, sustituir el controlador de motor por otro. Causa Solo CMMP-AS-...-M3: Módulo interno de tensión del módulo de seguridad o del módulo de microinterruptores.
- Página 268 Medida El error solo aparece después de un cambio del CAMC-G-S3. • En caso de cambio de módulo: Tipo de módulo no planificado. Tomar módulo montado actualmente CAMC-G-S3 como aceptado. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 269 En este caso, el error aparece cuando la unidad básica se desplaza en la dirección bloqueada en el modo de funcionamiento posicionamiento. Medida • Comprobar la aplicación y modificarla en caso necesario. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 270 • Comprobar si la señal de confirmación también conmuta realmente. • Comprobar si el tiempo de retardo parametrizado para la evaluación de la señal de confirmación para el freno utilizado es adecuado (en caso necesario, medir el tiempo de conmutación). Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 271 • Si el valor efectivo de velocidad en parada está muy distorsionado, comprobar los parámetros de experto para la detección de revoluciones y la detección de parada y adaptarlos en caso necesario. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 272 • Comprobar si el error puede ser validado y si vuelve a aparecer con una nueva demanda de STO; si es así: la unidad básica posiblemente está averiada. Si es posible, cambiarla por otra unidad básica. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 273 • Comprobación de la tensión de alimentación para el sensor de posición. • Comprobación del cable del motor / apantallamiento del cable en el lado del motor y del accionamiento; interferencias de EMC pueden causar el error. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 274 – El número de impulsos no coincide con la parametrización. – N.º de serie No coincide con la parametrización. – El tipo de transmisor no coincide con la parametrización. Medida • Comprobar la parametrización. • Utilizar solo transmisores permitidos. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 275 (P06.07) debería estar como mínimo entre el 30 % y el 50 % por encima de la aceleración máxima presentada. • Si se produce discontinuidad angular en los datos de posición de la unidad básica, validar el error una vez. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 276 Medida • Temporización perturbada. Si el error vuelve a aparecer después de un reinicio, es probable que el módulo de seguridad esté averiado. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 277 • Unidad de indicación y control manual: Comprobar cómo el usuario maneja el aparato; ¿se accionan ambos pulsadores dentro del tiempo de discrepancia? En caso necesario, llevar a cabo instrucción. • Comprobación de los tiempos de discrepancia ajustados; ¿son suficientes? Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 278 El mensaje de error se guarda en la memoria de diagnosis. Medida • Terminar la sesión de parametrización en el plazo de 8 h; en caso necesario, inciar una nueva sesión de parametrización y continuar. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 279 • Avería interna en el controlador de motor. • Comprobar si las versiones de firmware del módulo de seguridad, la unidad básica y la versión de revisión del plugin FCT y de SafetyTools son compatibles. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 280 – Sobretensión de alimentación de la lógica de +24 V detectada. Medida • Módulo averiado, cambiarlo. 59-3 Error fuente de alimentación interna 80F3h Configurable Causa – Tensión (interna 3,3 V, 5 V, referencia ADU) fuera del margen permitido. Medida • Módulo averiado, cambiarlo. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 281 Comprobar si el error se vuelve a producir después de un reinicio; si es así • Volver a parametrizar el módulo y volver a validar el conjunto de parámetros; si el error persiste: • Módulo averiado, cambiarlo. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 282 EtherCAT: Transmisión cíclica de datos errónea Configurable Causa Desconexión de la seguridad debido al fallo de la transmisión cíclica de datos. Medida • Comprobar la configuración del master. La transmisión síncrona no es estable. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 283 • La interfaz DeviceNet debe conectarse también a 24 V DC además de al controlador de motor. 64-2 DeviceNet: Memoria intermedia de recepción desbordada Configurable Causa Demasiados mensajes recibidos en poco tiempo. Medida • Reduzca la frecuencia de exploración. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 284 • Desactive la comunicación DeviceNet. • Conecte una interfaz. 65-1 Tiempo excedido de conexión IO Configurable Causa Interrupción de una conexión I/O. Medida • Dentro del tiempo esperado no se ha recibido ningún mensaje I/O. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 285 Modbus/TCP: Longitud del telegrama demasiado larga Configurable Causa Los datos transmitidos por el host son demasiado largos. El host envía más datos de los esperados por el controlador. Medida • Corregir longitud de datos en el host. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 286 Se ha detectado un error leve en la interfaz EtherNet/IP. Medida • Intente validar el error. • Ejecute un reinicio. 69-1 EtherNet/IP: Configuración IP equivocada Configurable Causa Se ha detectado una configuración IP equivocada. Medida • Corregir la configuración IP. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 287 • Comprobar la longitud de los datos parametrizados en el control para el telegrama de recepción del controlador. • Comprobar la longitud de los datos configurados en el editor FHPP+ editor de FCT. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 288 • Cambiar la interfaz. 72-6 PROFINET: Indicación no válida/no compatible Configurable Causa Ha llegado un mensaje de la interfaz PROFINET que no es compatible con el controlador de motor. Medida • Contactar con el soporte técnico. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 289 • Contactar con el soporte técnico. 80-3 F083h Rebose de interpolador, IRQ PSoff Causa No se ha podido calcular los datos de proceso en el ciclo de interpolación/posición/velocidad/corriente ajustado. Medida • Contactar con el soporte técnico. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 290 Causa La interfaz insertada se ha detectado pero no es compatible con el firmware cargado. Medida • Comprobar en el firmware si la interfaz es compatible. • Si es necesario, sustituya el firmware. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 291 Error interno N.º Código Mensaje Reacción 90-0 5080 h RAM externa no detectada PSoff Causa SRAM externa no detectada/insuficiente. Error de hardware (componente SRAM o tarjeta averiadas). Medida • Contactar con el soporte técnico. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 292 5080 h Versión de firmware ilegal PSoff Causa Una de las versiones de desarrollo compiladas para el depurador se ha cargado normalmente. Medida • Comprobar la versión de firmware. Si es necesario, actualícelo. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 293 Error al actualizar el cargador de arranque PSoff Causa Error durante la descarga de cargador de arranque solicitada. Medida • Volver a iniciar la descarga del cargador de arranque. • Enviar el equipo al fabricante para su comprobación. Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 294 (sin fallos; cambiar también el cable de conexión). Si el transmisores. error sigue apareciendo, hay una avería en el controlador de motor. El equipo debe ser reparado por el fabricante. Tab. B.2 Indicaciones sobre los mensajes de error 08-2 … 08-7 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 295 ....– Rampa de parada de emergencia ..Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 296 ....– Factor de posición ....Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 297 ..... . . max_buffer_size ..... . . Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 298 ......– objeto 1803h ......Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 299 ..... . . – Objeto 2415h_01h ....Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 300 ..... . . – Objeto 60C1h_02h ....Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 301 ....– Corriente nominal del dispositivo ..Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 302 Segundo objeto introducido ... . – TPDO3 Tercer objeto introducido ....Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 303 ....Polaridad sensor de temperatura de motor – target_torque ..... . . Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
- Página 304 ....sample_data ......Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español...
-
Página 305: Torque_Actual_Value
....tpdo_4_transmit_mask ....Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... -
Página 306: Velocity_Actual_Value
....velocity_acceleration_pos ....Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español... - Página 308 Copyright: Festo SE & Co. KG Postfach 73726 Esslingen Alemania Phone: +49 711 347-0 Fax: +49 711 347-2144 e-mail: service_international@festo.com Sin nuestra expresa autorización, queda terminantemente prohibida Internet: la reproducción total o parcial de este documento, así como su uso www.festo.com...